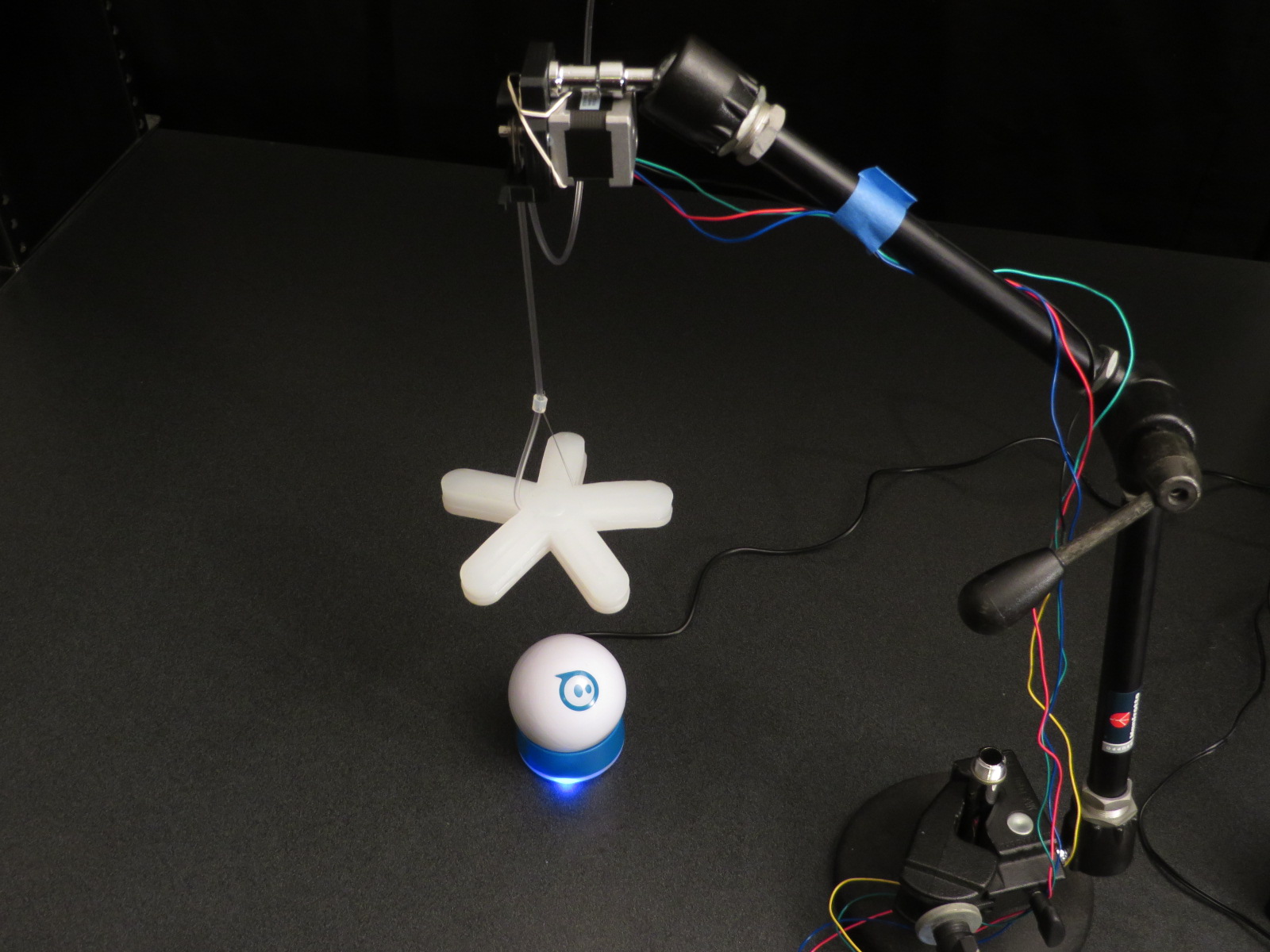
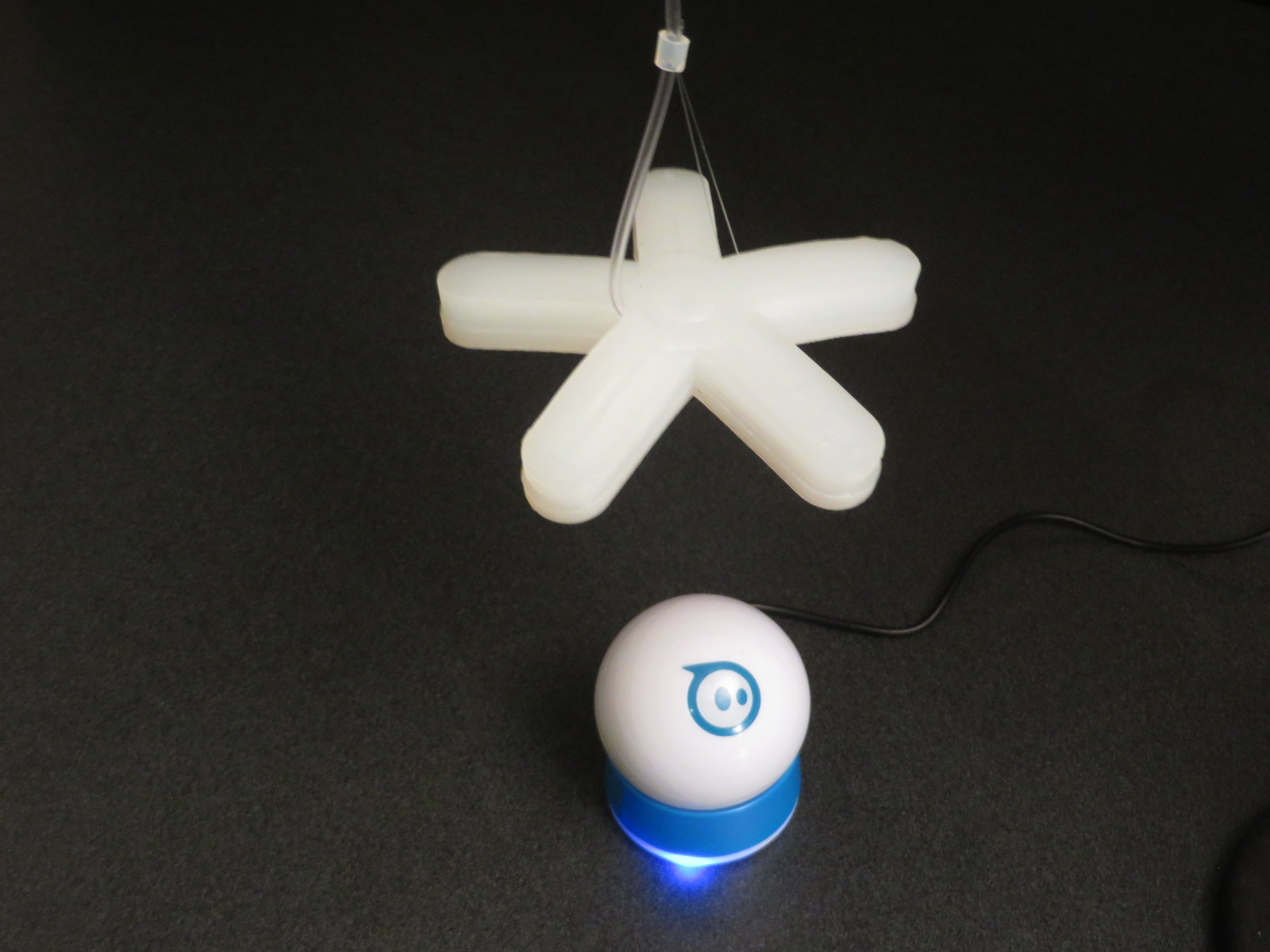
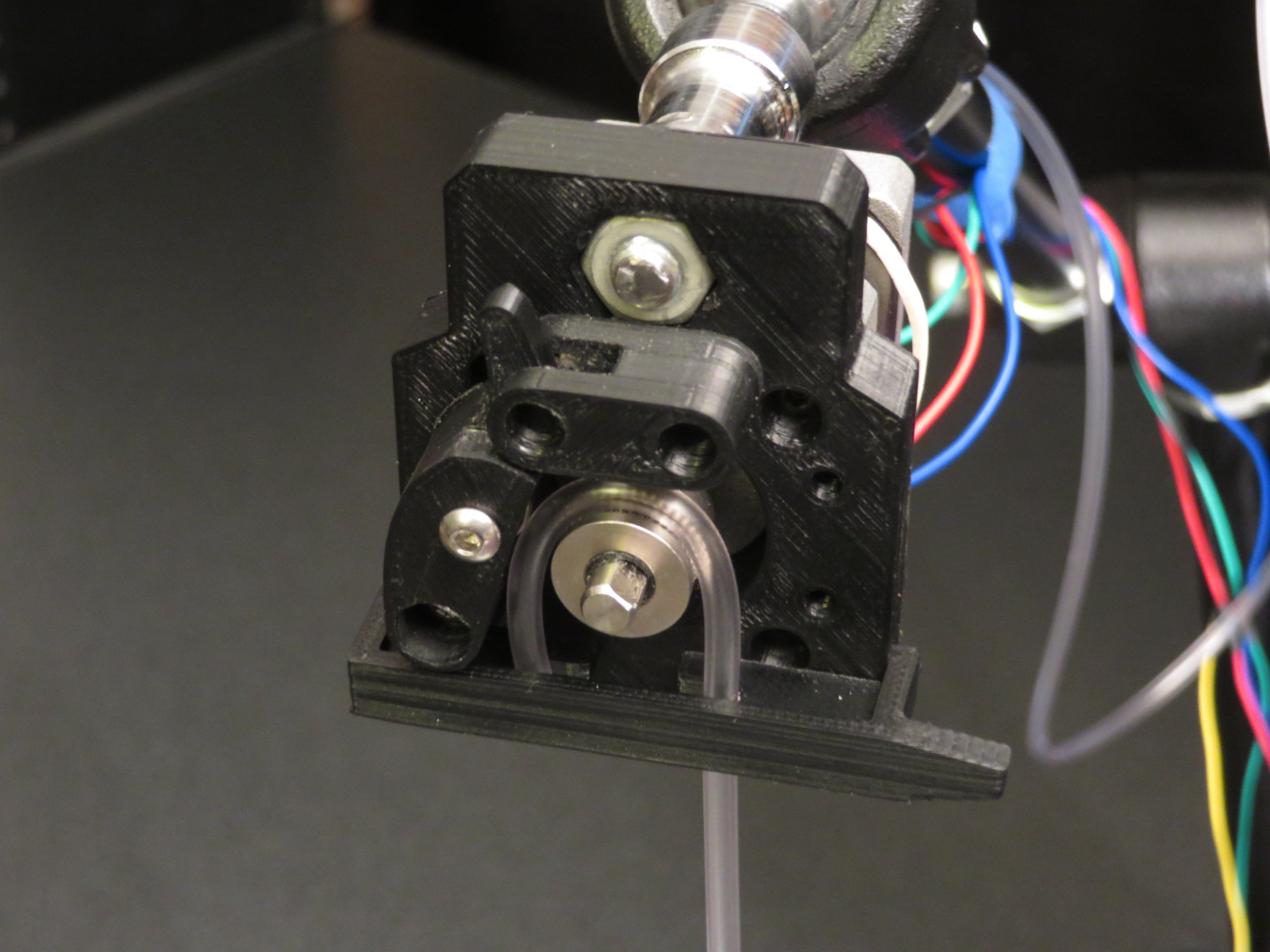
SoftRobotic 5 Sided Gripper. This robot is an adaptation of PneuNets and the amazing work from the Harvard Whitesides Research Group. The SoftRobot is a Multi-Material Pneumatic Actuator and is powered by a small air pump. The process is completely automated using an Arduino, air pump, solenoid valve, and a stepper motor. The SoftRobot can easily lift the Sphero (18.1 grams). To assure even wall thickness and reduce blowouts, five molds were designed and 3D Printed.